

Laboratorio di Visione
VBLab nasce nel 2008, ma i suoi membri vantano esperienze pluriennali nel settore della visione artificiale e più in generale delle misure senza contatto.
Ciò permette a VBLab di disporre di un importante patrimonio di conoscenze e di esperienza nei seguenti settori:
Sviluppo di briks per la visione 2D e la visione 3D
Studio, implementazione e qualificazione metrologica di algoritmi e di sistemi di misura senza contatto
Sviluppo di soluzioni dedicate in ambito industriale, medicale e forense
Particolare attenzione è stata rivolta alle metodologie di misura tridimensionale ed in particolare a:.
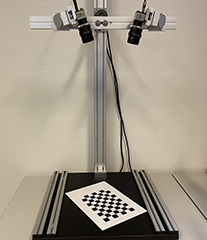
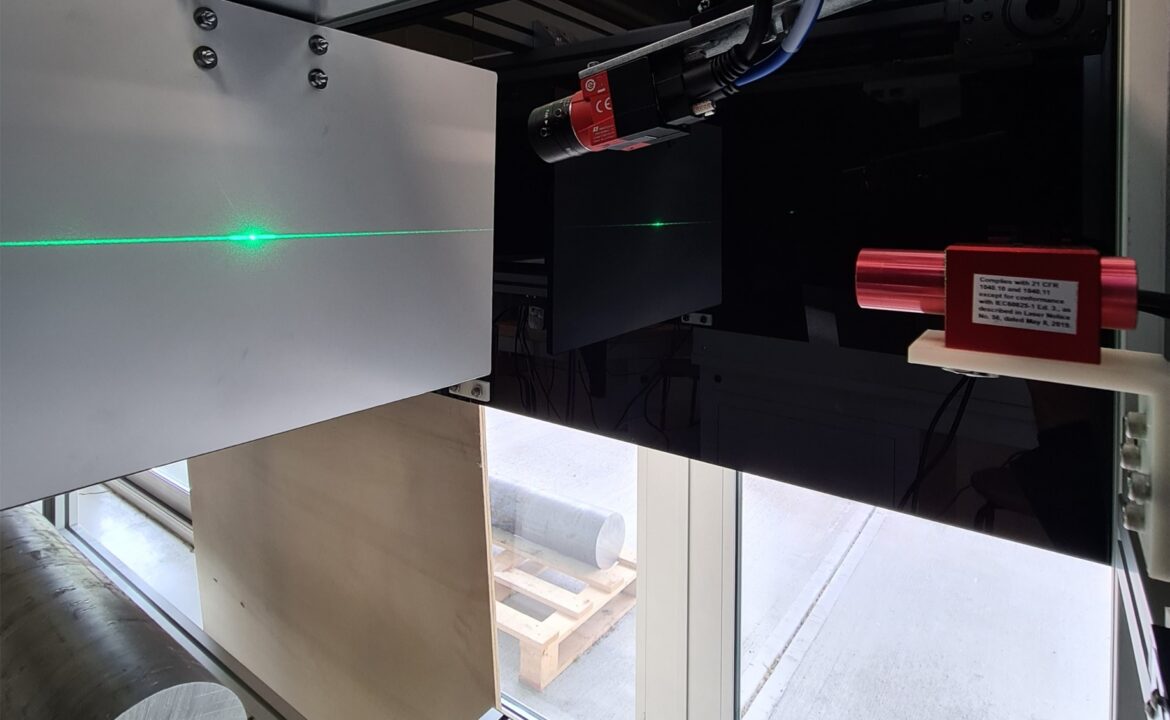
Visione Stereoscopica
La visione stereoscopica è una tecnica di ricostruzione 3D per l’estrazione di informazioni 3D da immagini 2D. Mentre la visione stereoscopica passiva si basa sulla geometria 3D e sugli algoritmi di triangolazione, la visione stereoscopica attiva impiega una sorgente di luce come un laser o una luce strutturata per migliorare la precisione della ricostruzione 3D. Entrambe le tecniche forniscono una mappatura 3D della scena inquadrata, questa viene chiamata nuvola di punti.
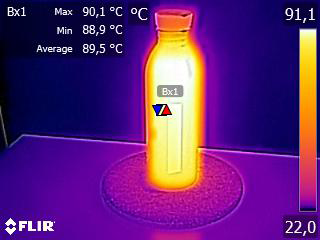
Termografia
La termografia ad infrarossi è una tecnologia di imaging basata sulla misura dell’emissione spettrale nell’infrarosso di un bersaglio specifico. Attraverso l’identificazione del contenuto di energia termica dell’oggetto inquadrato, la termografia garantisce la capacità di valutare la temperatura dell’oggetto in analisi.
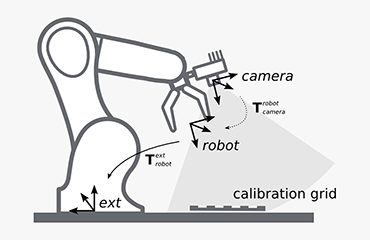
Hand Eye Calibration
La valutazione della posa relativa tra un robot e una telecamera fissa o mobile è comunemente chiamata hand-eye calibration. Questo processo permette l’identificazione delle componenti traslazionali e rotazionali tra un braccio robotico ed un dispositivo di imaging. La hand-eye calibration è comunemente utilizzata nelle applicazioni robotiche basate sulla visione per ottenere le componenti cinematiche necessarie.

Parallelamente è studiato il tema della calibrazione di telecamere, essenziale per ottenere informazioni metriche da immagini.
Nel corso delle attività di ricerca è emersa la necessità di approfondire i temi della modellazione geometrica e delle tecniche di segmentazione e clustering di nuvole di punti. Su tali argomenti è in atto una collaborazione con il gruppo di Modellazione Geometrica del Dipartimento di Ingegneria Meccanica dell’Imperial College London.
Un’ulteriore attività consiste nell’implementazione di sistemi termografici ad alta risoluzione spaziale basati su sensori normalmente utilizzati in applicazioni di visione.
Sin dalla sua nascita il laboratorio opera in stretta collaborazione con lo spin-off del Politecnico di Milano Innovative Security Solutions, con il quale ha sviluppato numerosi progetti di ricerca e attraverso cui svolge attività di trasferimento tecnologico sui temi della visione.
VB Lab nasce con lo scopo di:
Migliorare l’efficacia delle attività di ricerca in corso nelle sezioni che supporteranno VB Lab
Rendere visibili e disponibili tali conoscenze al Dipartimento
Promuovere il trasferimento della tecnologia relativa verso gli utilizzatori esterni.
Tali obiettivi saranno perseguiti promuovendo l’attività su più livelli:
Sviluppo di una ricerca di base coordinata con gli altri laboratori dell’Ateneo ed alcune tra le più importanti realtà a livello europeo
Fornitura di servizi all’interno dell’Ateneo
Sviluppo di dimostratori di soluzioni verticali per alcuni tra i più importanti ambiti applicativi nel settore industriale, forense e medicale
Fornitura di servizi verso l’esterno
3D Log Quality Inspection System
Il team del VBLab, in collaborazione con One Off Solution e Fondazione Politecnico, ha realizzato un innovativo sistema per la misura di rettilinearità e per l’analisi dei difetti superficiali di billette in alluminio, nell’ambito del progetto “Aluminium casted log quality inspection”. Il sistema realizzato, grazie ad un innovativo principio di…
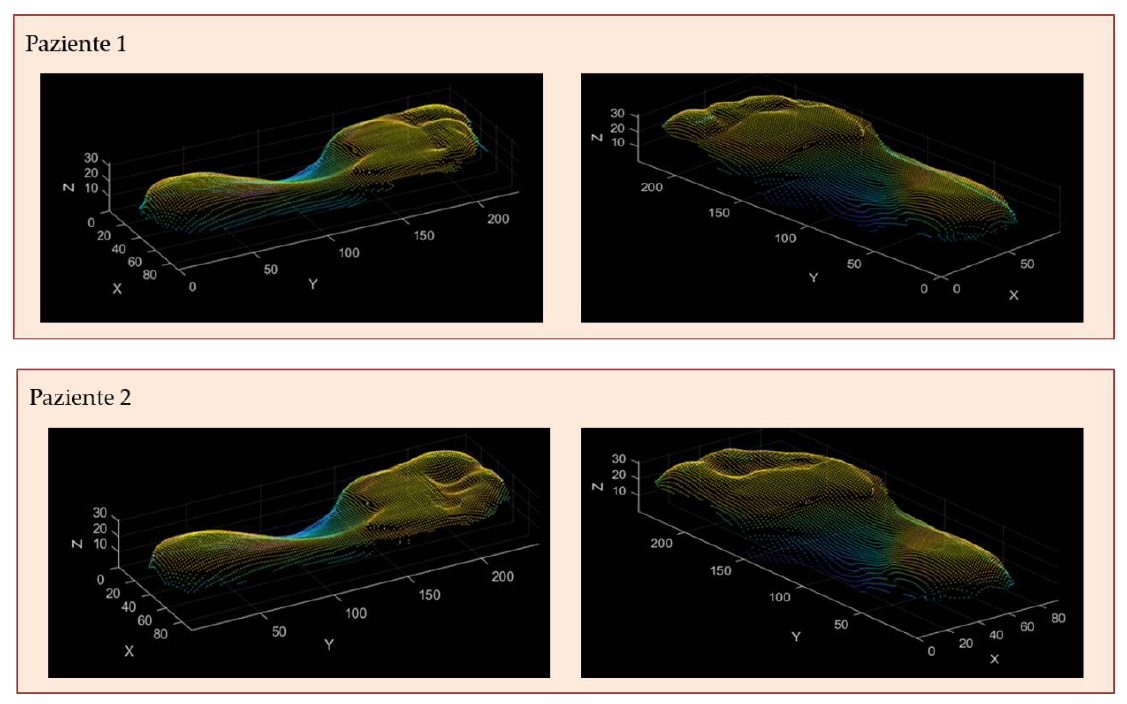
3D Vision e AI per plantari innovativi
Di Martino è una piccola ma dinamica azienda ortopedica specializzata nella produzione di plantari personalizzati, attiva da oltre 30 anni. L’azienda in questi anni è stata impegnata in un percorso di ricerca e innovazione che l’ha vista collaborare con il Politecnico di Milano, in particolare col Polo territoriale di Lecco, per…
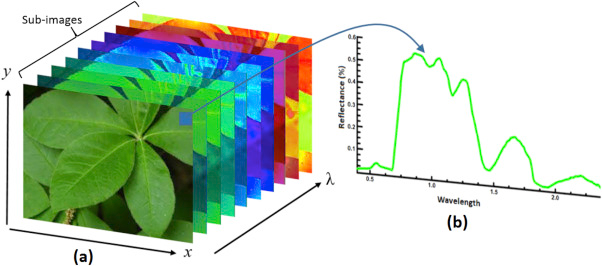
Progetto TESORO
Si è concluso il progetto TESORO, in cui il gruppo di ricerca del VBLab ha utilizzato diversi sistemi basati su AI per la classificazione di vegetali usando immagini iperspettrali. Si chiude un capitolo molto importante per noi!